|
|
创建工程
[backcolor=rgba(255, 255, 255, 0.35)]
00:00 / 02:08
[backcolor=rgba(0, 0, 0, 0.35)]流畅
[backcolor=rgba(0, 0, 0, 0.35)]1x
主程序主要代码main.c
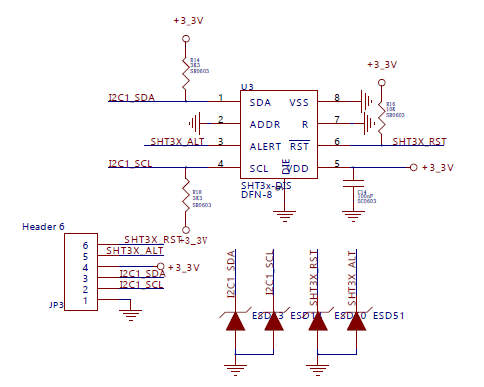
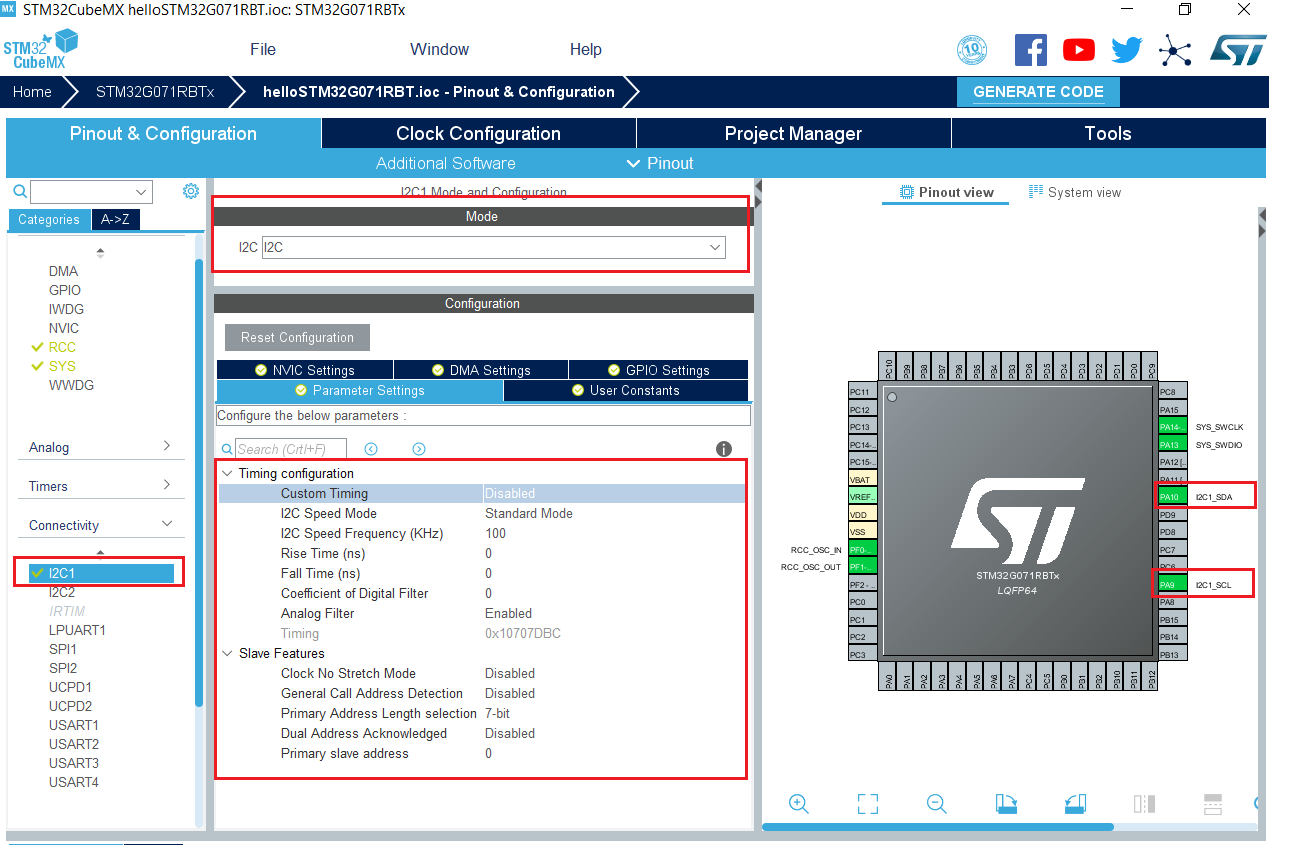
MX_GPIO_Init();MX_USART2_UART_Init();//G0和F7通信MX_USART1_UART_Init();MX_USART3_UART_Init();MX_USART4_UART_Init();//PrintfMX_I2C1_Init();APP_Init(); while (1) { tmp = HAL_GetTick(); if(tmp - tick > 1000) { tick = tmp; APP_Process(); printf("APP_Process\n\r"); } }读取传感器数据STM32CubeMX配置I2C外设
主要代码sht30hi2c.c
/* Includes ------------------------------------------------------------------*/#include "i2c.h"#include "sht30.h"extern I2C_HandleTypeDef hi2c1;typedef enum{ SHT30_OK = 0x00U, SHT30_ERROR = 0x01U,} SHT30_StatusTypeDef;//======================================I2Cx redefine start===================================static void I2Cx_Error(uint8_t Addr){ /* De-initialize the I2C communication bus */ HAL_I2C_DeInit(&hi2c1); /* Re-Initialize the I2C communication bus */ MX_I2C1_Init();} static void SHT3X_WriteCMD(unsigned short cmd){ uint8_t buf[2]; buf[0]=cmd>>8; buf[1]=cmd; HAL_StatusTypeDef status = HAL_OK; status = HAL_I2C_Master_Transmit(&hi2c1, SHT3X_WR_ADDR, buf, 2, 1000); if(status != HAL_OK) { /* I2C error occurred */ I2Cx_Error(SHT3X_WR_ADDR); }}static int SHT3X_ReadData(unsigned short cmd, unsigned char *buf, unsigned short len){ HAL_StatusTypeDef status = HAL_OK; status = HAL_I2C_Mem_Read(&hi2c1, SHT3X_WR_ADDR, cmd, I2C_MEMADD_SIZE_16BIT, buf, len, 1000); if(status != HAL_OK) { /* I2C error occurred */ I2Cx_Error(SHT3X_WR_ADDR); } return SHT30_OK;}static unsigned char SHT3X_CalcCrc(unsigned char *crcdata, unsigned char nbrOfBytes){ unsigned char Bit; // bit mask unsigned char crc = 0xFF; // calculated checksum unsigned char byteCtr; // byte counter // calculates 8-Bit checksum with given polynomial for(byteCtr = 0; byteCtr < nbrOfBytes; byteCtr++) { crc ^= (crcdata[byteCtr]); for(Bit = 8; Bit > 0; --Bit) { if(crc & 0x80) crc = (crc << 1) ^ POLYNOMIAL; else crc = (crc << 1); } } return crc;} void SHT3X_Init(void){ HAL_Delay(20); SHT3X_WriteCMD(CMD_MEAS_PERI_10_H); } int SHT3X_GetTempAndHumi(short *temp, short *humi){ unsigned long int rawValueTemp; // temperature raw value from sensor unsigned long int rawValueHumi; // humidity raw value from sensor unsigned char Rdata[6]={0}; if(SHT3X_ReadData(CMD_FETCH_DATA, Rdata, 6)==SHT30_ERROR) { return SHT30_ERROR; } if(Rdata[2] == SHT3X_CalcCrc(Rdata, 2) && Rdata[5] == SHT3X_CalcCrc(&Rdata[3], 2)) { rawValueTemp = (Rdata[0] << 8) | Rdata[1]; rawValueHumi = (Rdata[3] << 8) | Rdata[4]; *temp =(short)(1750 * rawValueTemp / 65535 - 450); *humi =(short)(1000 * rawValueHumi / 65535); HAL_GPIO_TogglePin(USR_LED1_GPIO_Port, USR_LED1_Pin);//LED1 return SHT30_OK; } return SHT30_ERROR;}sht30.h /* Define to prevent recursive inclusion -------------------------------------*/#ifndef __sht30_H#define __sht30_H#ifdef __cplusplus extern "C" {#endif/* Includes ------------------------------------------------------------------*/#include "main.h"#define CMD_READ_SERIALNBR 0x3780 // read serial number#define CMD_READ_STATUS 0xF32D // read status register#define CMD_CLEAR_STATUS 0x3041 // clear status register#define CMD_HEATER_ENABLE 0x306D // enabled heater#define CMD_HEATER_DISABLE 0x3066 // disable heater#define CMD_SOFT_RESET 0x30A2 // soft reset#define CMD_MEAS_CLOCKSTR_H 0x2C06 // meas. clock stretching, high rep.#define CMD_MEAS_CLOCKSTR_M 0x2C0D // meas. clock stretching, medium rep.#define CMD_MEAS_CLOCKSTR_L 0x2C10 // meas. clock stretching, low rep.#define CMD_MEAS_POLLING_H 0x2400 // meas. no clock stretching, high rep.#define CMD_MEAS_POLLING_M 0x240B // meas. no clock stretching, medium rep.#define CMD_MEAS_POLLING_L 0x2416 // meas. no clock stretching, low rep.#define CMD_MEAS_PERI_05_H 0x2032 // meas. periodic 0.5 mps, high rep.#define CMD_MEAS_PERI_05_M 0x2024 // meas. periodic 0.5 mps, medium rep.#define CMD_MEAS_PERI_05_L 0x202F // meas. periodic 0.5 mps, low rep.#define CMD_MEAS_PERI_1_H 0x2130 // meas. periodic 1 mps, high rep.#define CMD_MEAS_PERI_1_M 0x2126 // meas. periodic 1 mps, medium rep.#define CMD_MEAS_PERI_1_L 0x212D // meas. periodic 1 mps, low rep.#define CMD_MEAS_PERI_2_H 0x2236 // meas. periodic 2 mps, high rep.#define CMD_MEAS_PERI_2_M 0x2220 // meas. periodic 2 mps, medium rep.#define CMD_MEAS_PERI_2_L 0x222B // meas. periodic 2 mps, low rep.#define CMD_MEAS_PERI_4_H 0x2334 // meas. periodic 4 mps, high rep.#define CMD_MEAS_PERI_4_M 0x2322 // meas. periodic 4 mps, medium rep.#define CMD_MEAS_PERI_4_L 0x2329 // meas. periodic 4 mps, low rep.#define CMD_MEAS_PERI_10_H 0x2737 // meas. periodic 10 mps, high rep.#define CMD_MEAS_PERI_10_M 0x2721 // meas. periodic 10 mps, medium rep.#define CMD_MEAS_PERI_10_L 0x272A // meas. periodic 10 mps, low rep.#define CMD_FETCH_DATA 0xE000 // readout measurements for periodic mode#define CMD_R_AL_LIM_LS 0xE102 // read alert limits, low set#define CMD_R_AL_LIM_LC 0xE109 // read alert limits, low clear#define CMD_R_AL_LIM_HS 0xE11F // read alert limits, high set#define CMD_R_AL_LIM_HC 0xE114 // read alert limits, high clear#define CMD_W_AL_LIM_LS 0x6100 // write alert limits, low set#define CMD_W_AL_LIM_LC 0x610B // write alert limits, low clear#define CMD_W_AL_LIM_HS 0x611D // write alert limits, high set#define CMD_W_AL_LIM_HC 0x6116 // write alert limits, high clear#define CMD_NO_SLEEP 0x303E#define POLYNOMIAL 0x31 // P(x) = x^8 + x^5 + x^4 + 1 = 00110001#define SHT3XADDR 0x44 //SHT3X的I2C地址#define SHT3X_WR_ADDR (SHT3XADDR << 1)#define SHT3X_RD_ADDR (SHT3X_WR_ADDR | 0x01)void SHT3X_Init(void);int SHT3X_GetTempAndHumi(short *temp, short *humi);#ifdef __cplusplus}#endif#endif /*__ usart_H */
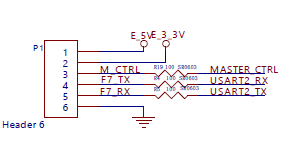
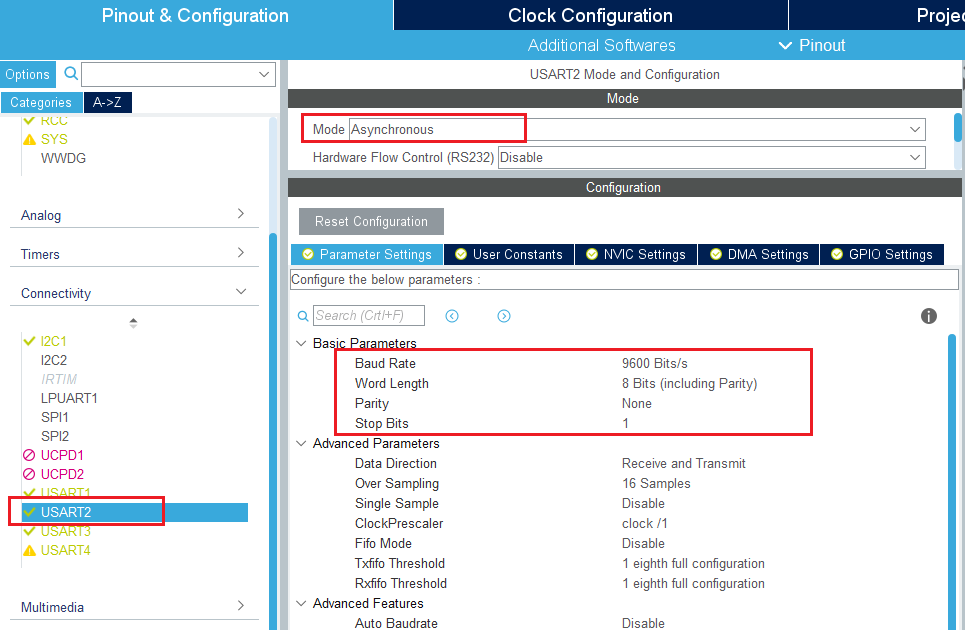
G0子板与F7子板通信STM32CubeMX配置USART外设根据原理图,STM32CubeMX配置G0通过USART2与F7子板通信外设:
主要代码app.c
static short temperature = 0, humidity = 0;#define FRM_START 0x68#define FRM_CMD_UPD_SENSOR 0x01#define FRM_FIXLEN 14#define FRM_END0 0x5c#define FRM_END1 0x6e#define FRM_POS_START 0#define FRM_POS_CMD 1#define FRM_POS_LEN 2#define FRM_POS_DATA 3#define FRM_POS_CRC 11#define FRM_POS_END0 12#define FRM_POS_END1 13//eg:68 cmd len t t h h x x y y crc 16 / crc = 68 + cmd + len + t + t + h + h + x + x + y + y 16extern UART_HandleTypeDef huart2;uint8_t cal_crc(uint8_t *buf,uint8_t len){ uint8_t t_crc = 0; uint8_t r_crc = 0; //check crc for(int i=0; i
|
|

 窥视卡
窥视卡 雷达卡
雷达卡


 发表于 2020-1-18 13:03:46
发表于 2020-1-18 13:03:46


 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 照妖镜
照妖镜






